Project UKV is an attempt to build an automated keyer specifically for the
RSGB Slow Morse broadcasts. The idea being to transmit precise error free
code at a specified constant speed.
I am a strong believer in the broadcast format used by the late Martyn Vincent, G3UKV
which was as follows:
Use HF.
Martyn's broadcasts were on 3.605MHz, which you will notice is NOT in the CW section
of the band, but in the all modes section.
Martyn would start on SSB, introducing the broadcast and explaining what was going to happen.
The broadcast was broken into 6 sections:
1) The introduction on SSB.
2) 5 wpm CW text for 5 mins (often from RadCom). followed by SSB read-back.
3) 8 wpm CW text for 5 mins followed by SSB read-back.
4) 12 wpm CW text for 5 mins followed by SSB read-back.
5) 8 wpm CW numerals in 5 character groups for 2 mins followed by SSB read-back.
6) A conclusion on SSB, followed by an invitation for listeners to check in on *SSB*.
To avoid the listener having to re-tune their rig and switch modes for the CW/SSB changes
Martyn would transmit his SSB on 3.6050 and his CW on 3.6043 thus providing a 700Hz tone
for the CW when listening on SSB.
Note that at the slower speeds Martyn often used 'Farnsworth' spacing for the characters
to help stop 'counting'.
The character set is restricted to A-Z 0-9 / ? . , [space]
and the following prosigns [CT] [BT] [SK] [AR]
The character speed is limited to between 1 wpm and 20 wpm and the maximum Farnsworth padding
is 10 dit times.
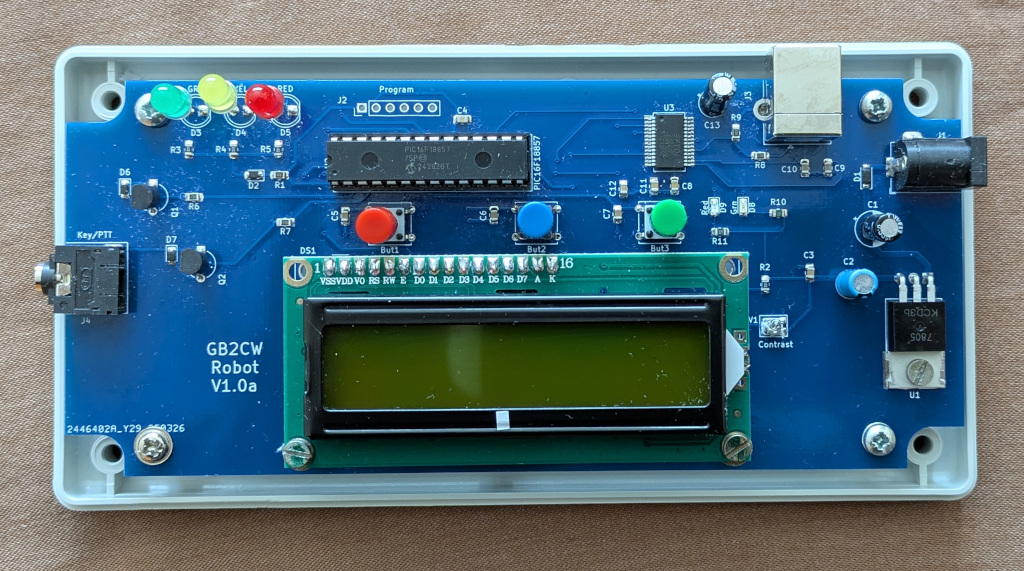
The idea for project UKV is that a small 'robot keyer' will be connected to a PC via a
serial-USB interface and an application will allow it to be configured for the broadcast.
Parameters such as speed and the actual text would be loaded into it. The text to be sent
would be 'validated' to ensure that no unwanted characters (such as apostrophes)
were included.
It would then be disconnected from the PC and placed next to the radio, connected only to
the 'Key' and 'PTT' inputs on the radio and a power source.
The operator would then start the broadcast
on SSB and at the appropriate times use the robot keyer to send the CW.
The device would have a small display and a number of push-buttons to control its operation
and monitor its status while connected to the radio.
I believe this would take a lot of the stress away from the operator (and if you listen,
some of them are obviously stressed) which would hopefully result in more people coming
forward to be operators and better quality CW being sent.

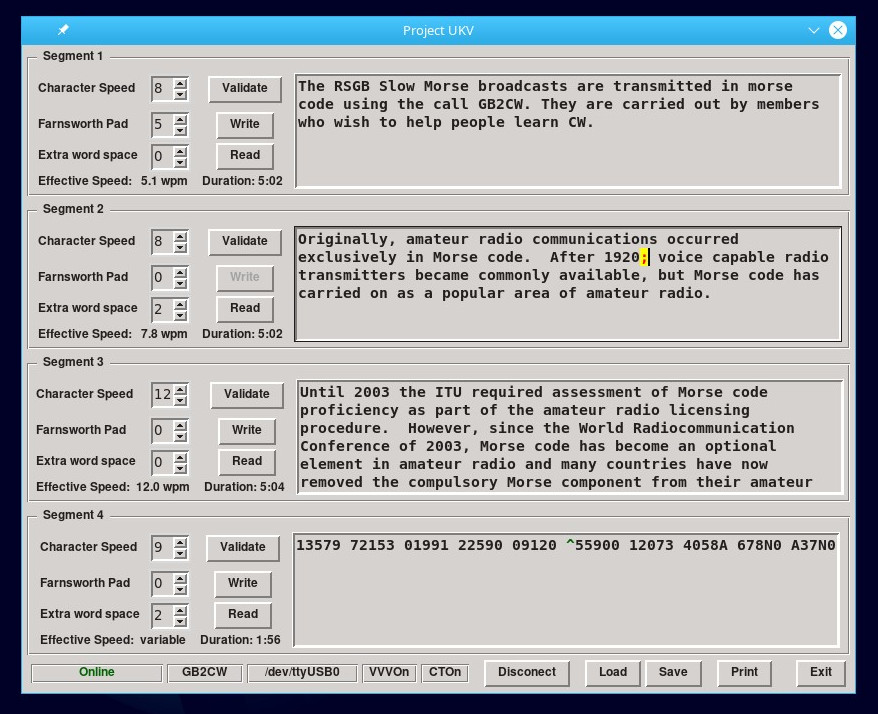
The host application status (lower left) shows that the robot keyer is connected.
It is possible to embed a '^' character which will increase the
speed by 1 wpm, or a '%' character which will decrease the Farnsworth padding
from that point in the segment text.
The text in Segment 1 has been validated and the 'Write' button is active
and can be used to write the segment to the target hardware.
The segment also has a Farnsworth padding set and this has lowered the effective speed.
Segment 2 shows some text with the errors marked by the validation process and
the 'Write' button is therefore inactive.
Segment 4 has a speed change incorporated and it therefore has the effective speed
shown as 'variable'.
Segments 2 and 4 also have Extra word space added which increases the duration slightly but
makes for easier copy for newcomers to CW.
All segments show their duration.

![]()
![]()